|
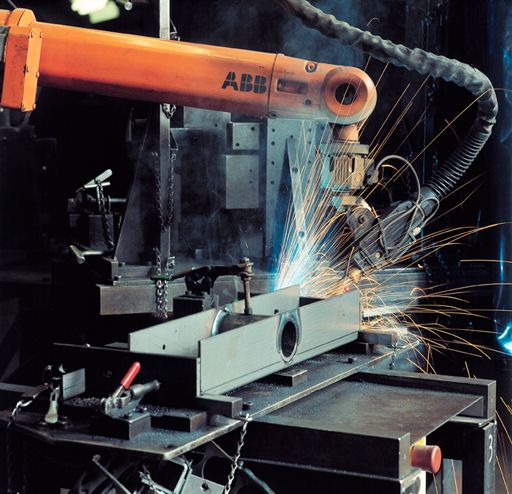
Welding fixtures and workpiece manipulators hold
and position parts to ensure precise welding by the robot. The productivity of the robot
welding cell is speeded up by having an automatically rotating or switching fixture,
so that the operator can be fixing one set of parts while the robot is welding
another.
To be able to guarantee that the electrode tip and the tool frame are accurately known
with respect to each other, the calibration process of the TCP (Tool
Center Point) is important. An automatic TCP calibration device facilitates this
time consuming task.
|
 A
special kind of
electrical power is required to make an arc weld. The special power is provided
by a welding machine, also known as a power source. All arc welding
processes use an arc welding gun or torch to transmit welding
current from a welding cable to the electrode. They also provide for shielding
the weld area from the atmosphere.
A
special kind of
electrical power is required to make an arc weld. The special power is provided
by a welding machine, also known as a power source. All arc welding
processes use an arc welding gun or torch to transmit welding
current from a welding cable to the electrode. They also provide for shielding
the weld area from the atmosphere.